FixTracker
Der Trend bei der modernen technischen UFO-Forschung, geht eindeutig zu autarken Überwachungssystemen, die in der Lage sind Objekte automatisch zu verfolgen.
Nach unserer Einschätzung sind wir bei solchen Systemen in Europa Systemführer.
Den Ansatz einer 360 Grad Überwachung haben wir nach genauen technischen Analysen verworfen. Der Grund ist die daraus entstehende Größe einer solchen Anlage. Auch die Kosten und der Support sind nicht wirklich vertretbar.
Unser Konzept ist ein modularer Aufbau.
Der erste Schritt ist der FixTracker. Hier werden Objekte automatisch erkannt und verfolgt. Das System kommt ganz ohne beweglich Teile aus. Die Kamera erfasst Objekte in einem festen optischen Bereich. Wenn ein Objekt erkannt wird, werden folgenden Funktionen ausgelöst.
- Das Objekt wird verfolgt.
- Es wird ein vergrößerter Bildausschnitt mit dem Objekt als Bilddatei gespeichert.
- Das Video der Treckingkamera wird als Datei gespeichert.
- Anfallende Messwerte von Magnetfeld und Gravitation werden in einer Datei gespeichert.
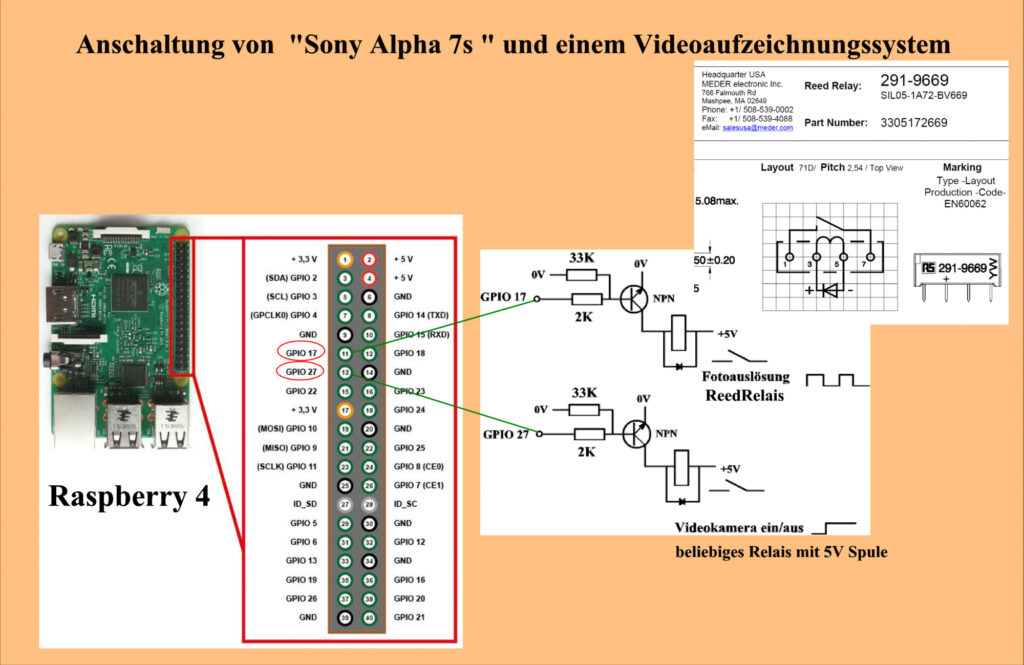
- Es werden zwei Relaiskontakte geschaltet. Ein Dauerkontakt für eine zusätzlich Videokamera und für eine schnelle Bildauslösung ein gepulster Relaiskontakt. Dieser Kontakt erzeugt eine Bildfolge an einer hochwertigen Fotokamera . (Wir benutze eine Sony Alpa7s)
- Das System ist in einem mobilen wetterfestem Koffer eingebaut. Über die Akkus kann das System für ca. 15 Stunden an jedem beliebigen Ort eingesetzt werden.
Diese Überwachungseinheit ist vorzugsweise für den Tag betrieb ausgelegt. Ein Nachtbetrieb ist auch möglich, jedoch nicht besonders sinnvoll.
Nach jahrelanger Erfahrung wissen wir, das fest installierte Systeme nur eine sehr kurze Zeit sinnvoll eingesetzt werden können. Aus uns unbekannten Gründen sind fest verbaute Systeme nach kurzer Zeit vom Phänomen erkannt und werden umgangen.
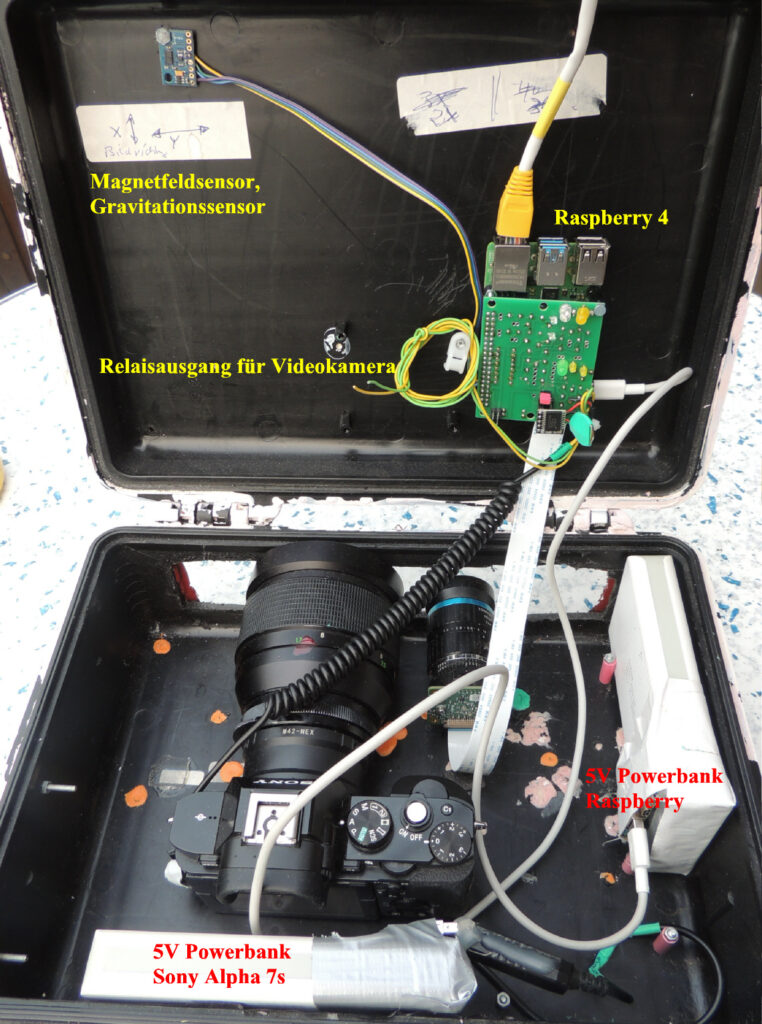
Der Aufbau kann in jeder beliebigen Form und in jedem verwendbarem Gehäuse erfolgen.
Der Steuercomputer ist ein Raspberry 4 mit zusätzlichen Echtzeituhr und einer kleinen Hilfselektronik. Das folgende Bild zeigt die elektrische Beschaltung. Die kleine Elektronikplatte für die GPIOs sollte keine so große Herausforderung sein.
Im folgenden sind alle zusätzlichen Bauteile mit Bezugsquellen aufgeführt. Stand dieser Information ist 8.2024.
Es gibt nun zwei Möglichkeiten ein lauffähiges Programm für den Raspberry zu erstellen. Der bequemste Weg ist mit mir (ausschließlich) per eMail Kontakt auf zu nehmen. Dann kann ich eine SD-Karte mit einem lauffähigem .img kopieren. Der etwas steinigere Weg ist selbst ein .img zu erstellen.
Hierzu die benötigten Informationen.
Das Python ITUF.py und die andere Python-Hilfsprogramme als ZIP-Datei herunter laden.
Für die Einrichtung auf dem Raspberrry : Name= pi Passwort= sichtung. Die notwendigen Bibliotheken für Import, zB. cv2…. müssen selbstständig auf dem Raspberry installiert werden.
Diese Systemeinstellungen wie folgt installieren.
—————————————————————————————————————————————
Datei: sudo nano /etc/xdg/autostart/display.desktop erstellen, mit folgenden Inhalt:
[Desktop Entry]
Name=PC
Exec=nohup /usr/bin/python3 /home/pi/ITUF.py
Das ‚Name=PC‘ ist egal, da kann man als Name alles hinschreiben was man will.
ITUF.py ist mein Script.
—————————————————————————————————————————————-
Echtzeituhr DS3231 in das System einbinden:
sudo raspi-config
dort Interfacing Options auswählen
I2C auswählen
ARM i2C Interface aktivieren
—————————————————————————————————————————————-
sudo nano /etc/rc.local
folgendes Befehle in die rc.local einfügen:
echo ds1307 0x68 > /sys/class/i2c-adapter/i2c-1/new_device
hwclock –hctosys
systemctl restart systemd-timesyncd.service
sleep 5
hwclock –set –date=“$(date „+%m/%d/%y %H:%M:%S“)“
————————————————————————————————————————————
sudo nano /etc/modules
folgendes Befehle in die modules einfügen:
i2c-dev
i2c-bcm2708
rtc-ds1307
Nun kann mit dem System gearbeitet werden. Die Bedienung und Funktion ist sehr einfach.
In der beschriebenen Einstellung arbeitet das Sytem sofort nach dem einschalten der Stromversorgung. Das Python Programm kann dann auch nicht mehr gestoppt werden.
Der Grund ist, daß bei einem Feldeinsatz nicht erst das System mit Hilfe einer Netzwerkverbindung und einem zusätzlichen PC umständlich gestartet werden muß.
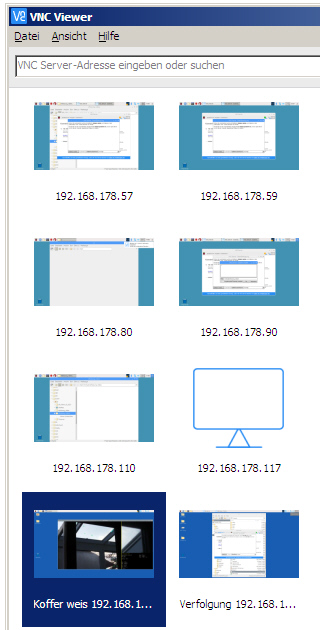
Das Dow load der Videos, Bilder und Messdaten aus dem Ordner TreckerData erfolgt über VNC (Freigabe = sichtung). Im folgenden siehe Beispiel:
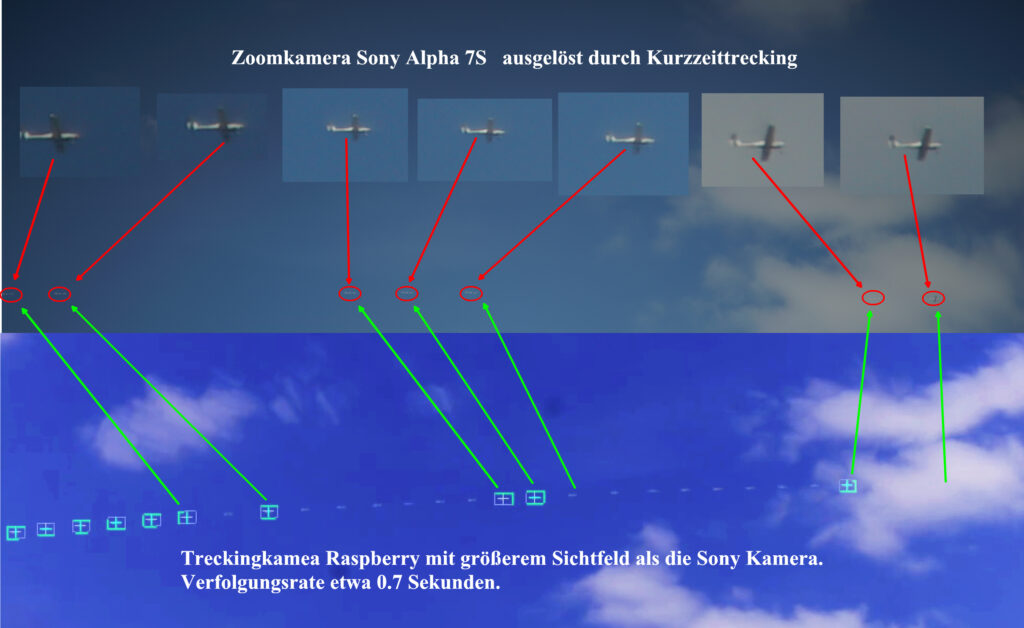
In dem folgenden Bild sehen Sie die arbeitsweise des Raspberry – Systems.
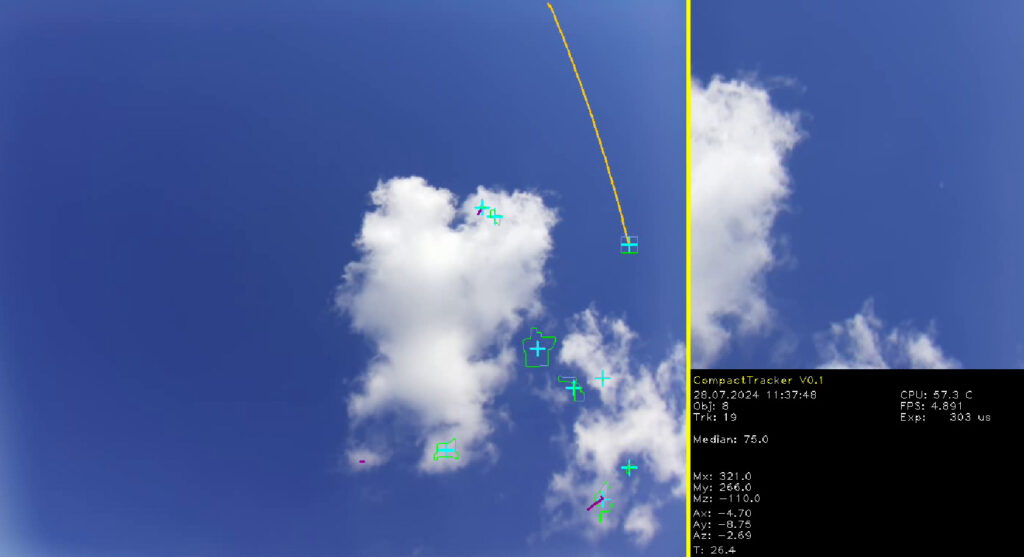
Links ist der markierte Treck eines Objekts. Im rechten Bild sehen Sie eine Bildvergrößerung mit alle relevanten Daten . OK, das ist für sich alleine nicht besonders ergiebig. Deshalb ist da ja die Möglichkeit Zusatzkameras zu aktivieren. Im weiteren sehen Sie ein Beispiel aus der Praxis.
In seltenen Fällen gibt es nicht nur ein interessantes Verfolgungsvideo/Bildfolge, sondern auch noch beachtenswerte Messdaten. Diese werden durch ein gesondertes Programm angezeigt.